| .github | ||
| build | ||
| cmake | ||
| conf | ||
| data | ||
| docs | ||
| install | ||
| LICENSES | ||
| src | ||
| .clang-format | ||
| .clang-tidy | ||
| .gitignore | ||
| AUTHORS | ||
| CITATION.cff | ||
| CMakeLists.txt | ||
| CODE_OF_CONDUCT.md | ||
| CONTRIBUTING.md | ||
| COPYING | ||
| README.md | ||
![]()
![]()
![]()
Welcome to GNSS-SDR!
This program is a software-defined receiver which is able to process (that is, to perform detection, synchronization, demodulation and decoding of the navigation message, computation of observables, and, finally, computation of position fixes) the following Global Navigation Satellite System's signals:
In the L1 band:
- 🛰 GLONASS L1 C/A (centered at 1602.000 MHz) ✅
- 🛰 GPS L1 C/A (centered at 1575.420 MHz) ✅
- 🛰 Galileo E1b/c (centered at 1575.420 MHz) ✅
- 🛰 BeiDou B1I (centered at 1561.098 MHz) ✅
In the E6 band:
- 🛰 Galileo E6B (centered at 1278.750 MHz) ✅
In the L2 band:
- 🛰 BeiDou B3I (centered at 1268.520 MHz) ✅
- 🛰 GLONASS L2 C/A (centered at 1246.000 MHz) ✅
- 🛰 GPS L2C (centered at 1227.600 MHz) ✅
In the L5 band:
- 🛰 Galileo E5b (centered at 1207.140 MHz) ✅
- 🛰 Galileo E5a (centered at 1176.450 MHz) ✅
- 🛰 GPS L5 (centered at 1176.450 MHz) ✅
GNSS-SDR provides interfaces for a wide range of radio frequency front-ends and raw sample file formats, generates processing outputs in standard formats, allows for the full inspection of the whole signal processing chain, and offers a framework for the development of new features. Please visit https://gnss-sdr.org for more information about this open-source, software-defined GNSS receiver.
✨ See what's new in the changelog.
Table of Contents
(click to expand)
- Table of Contents
- How to build GNSS-SDR
- GNU/Linux
- Alternative 1: Install dependencies using software packages
- Alternative 2: Install dependencies using PyBOMBS
- Manual installation of other required dependencies
- Install Armadillo, a C++ linear algebra library
- Install Gflags, a commandline flags processing module for C++
- Install Glog, a library that implements application-level logging
- Install the GnuTLS or OpenSSL libraries
- Install Matio, MATLAB MAT file I/O library
- Install Protocol Buffers, a portable mechanism for serialization of structured data
- Install Pugixml, a light-weight C++ XML processing library
- Download GoogleTest
- Clone GNSS-SDR's Git repository
- Build and install GNSS-SDR
- macOS
- Other builds
- GNU/Linux
- Updating GNSS-SDR
- Getting started
- Using GNSS-SDR
- About the software license
- Publications and Credits
- Ok, now what?
How to build GNSS-SDR
This section describes how to set up the compilation environment in GNU/Linux or macOS / Mac OS X, and to build GNSS-SDR. See also our build and install page.
GNU/Linux
- Tested distributions: Ubuntu 14.04 LTS and above; Debian 8.0 "jessie" and above; Arch Linux; CentOS 7; Fedora 26 and above; OpenSUSE 42.3 and above.
- Supported microprocessor architectures:
- i386: Intel x86 instruction set (32-bit microprocessors).
- amd64: also known as x86-64, the 64-bit version of the x86 instruction set, originally created by AMD and implemented by AMD, Intel, VIA, and others.
- armel: ARM embedded ABI, supported on ARM v4t and higher.
- armhf: ARM hard float, ARMv7 + VFP3-D16 floating-point hardware extension + Thumb-2 instruction set and above.
- arm64: ARM 64 bits or ARMv8.
- mips: MIPS architecture (big-endian, such as those manufactured by SGI).
- mipsel: MIPS architecture (little-endian, such as Loongson 3).
- mips64el: 64-bit version of MIPS architecture.
- powerpc: the RISC 32-bit microprocessor architecture developed by IBM, Motorola (now Freescale), and Apple.
- ppc64: 64-bit big-endian PowerPC architecture.
- ppc64el: 64-bit little-endian PowerPC architecture.
- s390x: IBM System z architecture for mainframe computers.
Older distribution releases might work as well, but you will need GCC 4.7 or newer.
Before building GNSS-SDR, you need to install all the required dependencies. There are two alternatives here: through software packages or building them from the source code. It is in general not a good idea to mix both approaches.
Alternative 1: Install dependencies using software packages
If you want to start building and running GNSS-SDR as quickly and easily as possible, the best option is to install all the required dependencies as binary packages.
Debian / Ubuntu
If you are using Debian 8, Ubuntu 14.10 or above, this can be done by copying and pasting the following line in a terminal:
$ sudo apt-get install build-essential cmake git pkg-config libboost-dev libboost-date-time-dev \
libboost-system-dev libboost-filesystem-dev libboost-thread-dev libboost-chrono-dev \
libboost-serialization-dev liblog4cpp5-dev libuhd-dev gnuradio-dev gr-osmosdr \
libblas-dev liblapack-dev libarmadillo-dev libgflags-dev libgoogle-glog-dev \
libgnutls-openssl-dev libpcap-dev libmatio-dev libpugixml-dev libgtest-dev \
libprotobuf-dev protobuf-compiler python3-mako
Please note that the required files from libgtest-dev were moved to
googletest in Debian 9 "stretch" and Ubuntu 18.04 "bionic", and moved back
again to libgtest-dev in Debian 10 "buster" and Ubuntu 18.10 "cosmic" (and
above).
Since Ubuntu 21.04 Hirsute / Debian 11, the package libcpu-features-dev is
also required.
Note for Ubuntu 14.04 LTS "trusty" users: you will need to build from source
and install GNU Radio manually, as explained below, since GNSS-SDR requires
gnuradio-dev >= 3.7.3, and Ubuntu 14.04 came with 3.7.2. Install all the
packages above BUT EXCEPT libuhd-dev, gnuradio-dev, and gr-osmosdr (and
remove them if they are already installed in your machine), and install those
dependencies using PyBOMBS. The same applies to libmatio-dev: Ubuntu 14.04
came with 1.5.2 and the minimum required version is 1.5.3. Please do not install
the libmatio-dev package and install libtool, automake and libhdf5-dev
instead. A recent version of the library will be downloaded and built
automatically if CMake does not find it installed.
In distributions older than Ubuntu 16.04 or Debian 9, python3-mako must be
replaced by python-mako. For Ubuntu 14.04, you will need to add the package
python-six to the list of dependencies.
Note for Debian 8 "jessie" users: please see the note about libmatio-dev
above. Install libtool, automake and libhdf5-dev instead. You will also
need python-six.
Once you have installed these packages, you can jump directly to download the source code and build GNSS-SDR.
Arch Linux
If you are using Arch Linux:
$ pacman -S gcc make cmake pkgconf git boost boost-libs log4cpp libvolk gnuradio \
blas lapack gflags google-glog openssl pugixml libmatio protobuf \
python-mako libpcap gtest
Once you have installed these packages, you can jump directly to download the source code and build GNSS-SDR.
CentOS
If you are using CentOS 7, you can install the dependencies via Extra Packages for Enterprise Linux (EPEL):
$ sudo yum install wget
$ wget https://dl.fedoraproject.org/pub/epel/epel-release-latest-7.noarch.rpm
$ sudo rpm -Uvh epel-release-latest-7.noarch.rpm
$ sudo yum install make automake gcc gcc-c++ kernel-devel libtool \
hdf5-devel cmake git boost-devel boost-date-time boost-system \
boost-filesystem boost-thread boost-chrono boost-serialization \
log4cpp-devel gnuradio-devel gr-osmosdr-devel blas-devel lapack-devel \
armadillo-devel openssl-devel libpcap-devel python-mako python-six pugixml-devel
Once you have installed these packages, you can jump directly to download the source code and build GNSS-SDR.
Fedora
If you are using Fedora 26 or above, the required software dependencies can be installed by doing:
$ sudo yum install make automake gcc gcc-c++ kernel-devel cmake git boost-devel \
boost-date-time boost-system boost-filesystem boost-thread boost-chrono \
boost-serialization log4cpp-devel gnuradio-devel gr-osmosdr-devel \
blas-devel lapack-devel matio-devel armadillo-devel gflags-devel \
glog-devel openssl-devel libpcap-devel pugixml-devel python3-mako \
protobuf-devel protobuf-compiler
In Fedora 33 and above, you will need to add gmp-devel to the package list.
Optionally, you can add uhd-devel starting from Fedora 32.
In Fedora 36 and above, packages spdlog-devel and fmt-devel are also
required.
openSUSE
If you are using openSUSE Leap:
$ zypper install cmake git gcc-c++ boost-devel libboost_atomic-devel \
libboost_system-devel libboost_filesystem-devel libboost_chrono-devel \
libboost_thread-devel libboost_serialization-devel log4cpp-devel \
gnuradio-devel pugixml-devel libpcap-devel armadillo-devel libtool \
automake hdf5-devel openssl-devel python3-Mako protobuf-devel
If you are using openSUSE Tumbleweed:
$ zypper install cmake git gcc-c++ boost-devel libboost_atomic-devel \
libboost_system-devel libboost_filesystem-devel libboost_date_time-devel \
libboost_thread-devel libboost_chrono-devel libboost_serialization-devel \
spdlog-devel fmt-devel gtest gnuradio-devel pugixml-devel libpcap-devel \
armadillo-devel libtool automake hdf5-devel libopenssl-devel \
python3-Mako protobuf-devel
Once you have installed these packages, you can jump directly to download the source code and build GNSS-SDR.
Rocky Linux
If you are using Rocky Linux:
$ dnf install -y 'dnf-command(config-manager)'
$ dnf config-manager --set-enabled powertools
$ yum install -y epel-release
$ yum install -y make gcc gcc-c++ kernel-devel cmake git boost-devel \
boost-date-time boost-system boost-thread boost-chrono boost-serialization \
log4cpp-devel gmp-devel uhd-devel gnuradio-devel pugixml-devel matio-devel \
protobuf-devel glog-devel libpcap-devel blas-devel lapack-devel \
armadillo-devel openssl-devel python3-mako libarchive
Once you have installed these packages, you can jump directly to download the source code and build GNSS-SDR.
Alternative 2: Install dependencies using PyBOMBS
This option is adequate if you are interested in development, in working with the most recent versions of software dependencies, want more fine-tuning on the installed versions, or simply in building everything from the scratch just for the fun of it. In such cases, we recommend using PyBOMBS (Python Build Overlay Managed Bundle System), GNU Radio's meta-package manager tool that installs software from source, or whatever the local package manager is, that automatically does all the work for you. Please take a look at the configuration options and general PyBOMBS usage at https://github.com/gnuradio/pybombs. Here we provide a quick step-by-step tutorial.
First of all, install some basic packages:
$ sudo apt-get install git python3-pip
Download, build and install PyBOMBS:
$ sudo pip3 install --upgrade git+https://github.com/gnuradio/pybombs.git
Apply a configuration:
$ pybombs auto-config
Add list of default recipes:
$ pybombs recipes add-defaults
Download, build and install GNU Radio, related drivers, and some other extra
modules into the directory /path/to/prefix (replace this path by your
preferred one, for instance $HOME/sdr):
$ pybombs prefix init /path/to/prefix -a myprefix -R gnuradio-default
This will perform a local installation of the dependencies under
/path/to/prefix, so they will not be visible when opening a new terminal. In
order to make them available, you will need to set up the adequate environment
variables:
$ cd /path/to/prefix
$ . ./setup_env.sh
Now you are ready to use GNU Radio and to jump into building GNSS-SDR after installing a few other dependencies. Actually, those are steps that PyBOMBS can do for you as well:
$ pybombs install gnss-sdr
By default, PyBOMBS installs the ‘next’ branch of GNSS-SDR development, which is
the most recent version of the source code. This behavior can be modified by
altering the corresponding recipe at
$HOME/.pybombs/recipes/gr-recipes/gnss-sdr.lwr
In case you do not want to use PyBOMBS and prefer to build and install GNSS-SDR
step by step (i.e., cloning the repository and doing the usual
cmake .. && make && make install dance), Armadillo, GFlags, Glog, GnuTLS, and
Matio can be installed either by using PyBOMBS:
$ pybombs install armadillo gflags glog gnutls matio
or manually as explained below, and then please follow instructions on how to download the source code and build GNSS-SDR.
Manual installation of other required dependencies
Install Armadillo, a C++ linear algebra library
$ sudo apt-get install libblas-dev liblapack-dev # For Debian/Ubuntu/LinuxMint
$ sudo yum install lapack-devel blas-devel # For Fedora/CentOS/RHEL
$ sudo zypper install lapack-devel blas-devel # For OpenSUSE
$ sudo pacman -S blas lapack # For Arch Linux
$ wget https://sourceforge.net/projects/arma/files/armadillo-11.2.1.tar.xz
$ tar xvfz armadillo-11.2.1.tar.xz
$ cd armadillo-11.2.1
$ cmake .
$ make
$ sudo make install
The full stop separated from cmake by a space is important.
CMake will figure out what other
libraries are currently installed and will modify Armadillo's configuration
correspondingly. CMake will also generate a run-time armadillo library, which is
a combined alias for all the relevant libraries present on your system (e.g.,
BLAS, LAPACK, and ATLAS).
Install Gflags, a commandline flags processing module for C++
$ wget https://github.com/gflags/gflags/archive/v2.2.2.tar.gz
$ tar xvfz v2.2.2.tar.gz
$ cd gflags-2.2.2
$ cmake -DBUILD_SHARED_LIBS=ON -DBUILD_STATIC_LIBS=OFF -DBUILD_gflags_nothreads_LIB=OFF .
$ make
$ sudo make install
$ sudo ldconfig
Install Glog, a library that implements application-level logging
$ wget https://github.com/google/glog/archive/v0.6.0.tar.gz
$ tar xvfz v0.6.0.tar.gz
$ cd glog-0.6.0
$ mkdir build && cd build
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig
Install the GnuTLS or OpenSSL libraries
$ sudo apt-get install libgnutls-openssl-dev # For Debian/Ubuntu/LinuxMint
$ sudo yum install openssl-devel # For Fedora/CentOS/RHEL
$ sudo zypper install openssl-devel # For OpenSUSE
$ sudo pacman -S openssl # For Arch Linux
In case the GnuTLS library with openssl extensions package is not available in your GNU/Linux distribution, GNSS-SDR can also work well with OpenSSL.
Install Matio, MATLAB MAT file I/O library
$ wget https://github.com/tbeu/matio/releases/download/v1.5.23/matio-1.5.23.tar.gz
$ tar xvfz matio-1.5.23.tar.gz
$ cd matio-1.5.23
$ ./configure
$ make
$ sudo make install
$ sudo ldconfig
Install Protocol Buffers, a portable mechanism for serialization of structured data
GNSS-SDR requires Protocol Buffers v3.0.0 or later. If the packages that come with your distribution are older than that (e.g., Ubuntu 16.04 Xenial and Debian 8 Jessie came with older versions), then you will need to install it manually. First, install the dependencies:
$ sudo apt-get install autoconf automake libtool curl make g++ unzip
and then:
$ git clone https://github.com/protocolbuffers/protobuf.git
$ cd protobuf
$ git submodule update --init --recursive
$ ./autogen.sh
$ /configure
$ make -j$(nproc)
$ sudo make install
$ sudo ldconfig
For more options, please check the Protocol Buffers' installation instructions.
Install Pugixml, a light-weight C++ XML processing library
$ wget https://github.com/zeux/pugixml/releases/download/v1.13/pugixml-1.13.tar.gz
$ tar xvfz pugixml-1.13.tar.gz
$ cd pugixml-1.13
$ mkdir build && cd build
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig
Download GoogleTest
$ wget https://github.com/google/googletest/archive/release-1.12.1.zip
$ unzip release-1.12.1.zip
Please DO NOT build or install Google Test. Every user needs to compile
tests using the same compiler flags used to compile the Google Test libraries;
otherwise, he or she may run into undefined behaviors (i.e., the tests can
behave strangely and may even crash for no obvious reasons). The explanation is
that C++ has the One-Definition Rule: if two C++ source files contain different
definitions of the same class/function/variable, and you link them together, you
violate the rule. The linker may or may not catch the error (in many cases it is
not required by the C++ standard to catch the violation). If it does not, you
get strange run-time behaviors that are unexpected and hard to debug. If you
compile Google Test and your test code using different compiler flags, they may
see different definitions of the same class/function/variable (e.g., due to
the use of #if in Google Test). Therefore, for your sanity, GNSS-SDR does not
make use of pre-compiled Google Test libraries. Instead, it compiles Google
Test's source code itself, such that it can be sure that the same flags are used
for both Google Test and the tests. The building system of GNSS-SDR manages the
compilation and linking of Google Test's source code to its own tests; it is
only required that you tell the system where the Google Test folder that you
downloaded resides. Just type in your terminal (or add it to your
$HOME/.bashrc file for a permanent solution) the following line:
export GTEST_DIR=/home/username/googletest-release-1.12.1
changing /home/username/googletest-release-1.12.1 by the actual path where you
unpacked Google Test. If the CMake script does not find that folder, or the
environment variable is not defined, or the source code is not installed by a
package, then it will download a fresh copy of the Google Test source code and
will compile and link it for you.
Clone GNSS-SDR's Git repository
$ git clone https://github.com/gnss-sdr/gnss-sdr
Cloning the GNSS-SDR repository as in the line above will create a folder named gnss-sdr with the following structure:
|-gnss-sdr
|---build <- where gnss-sdr is built.
|---cmake <- CMake-related files.
|---conf <- Configuration files. Each file defines one particular receiver.
|---data <- Populate this folder with your captured data.
|---docs <- Contains documentation-related files.
|---install <- Executables will be placed here.
|---src <- Source code folder.
|-----algorithms <- Signal processing blocks.
|-----core <- Control plane, interfaces, systems' parameters.
|-----main <- Main function of the C++ program.
|-----tests <- QA code.
|-----utils <- some utilities (e.g. Matlab scripts).
By default, you will be in the 'main' branch of the Git repository, which corresponds to the latest stable release. If you want to try the latest developments, you can use the 'next' branch by going to the newly created gnss-sdr folder doing:
$ git checkout next
More information about GNSS-SDR-specific Git usage and pointers to further readings can be found at our Git tutorial.
Build and install GNSS-SDR
Go to GNSS-SDR's build directory:
$ cd gnss-sdr/build
Configure and build the application:
$ cmake ..
$ make
By default, CMake will build the Release version, meaning that the compiler will generate a fast, optimized executable. This is the recommended build type when using an RF front-end and you need to attain real-time. If working with a file (and thus without real-time constraints), you may want to obtain more information about the internals of the receiver, as well as more fine-grained logging. This can be done by building the Debug version, by doing:
$ cmake -DCMAKE_BUILD_TYPE=Debug ..
$ make
This will create four executables at gnss-sdr/install, namely gnss-sdr,
run_tests, front-end-cal and volk_gnsssdr_profile. You can run them from
that folder, but if you prefer to install gnss-sdr on your system and have it
available anywhere else, do:
$ sudo make install
This will also make a copy of the conf/ folder into /usr/local/share/gnss-sdr/conf for your reference. We suggest creating a working directory at your preferred location and store your own configuration and data files there.
You could be interested in creating the documentation (requires:
sudo apt-get install doxygen-latex in Ubuntu/Debian) by doing:
$ make doc
from the gnss-sdr/build folder. This will generate HTML documentation that can be retrieved pointing your browser of preference to build/docs/html/index.html. If a LaTeX installation is detected in your system,
$ make pdfmanual
will create a PDF manual at build/docs/GNSS-SDR_manual.pdf. Finally,
$ make doc-clean
will remove the content of previously generated documentation.
GNSS-SDR comes with a library which is a module of the Vector-Optimized Library
of Kernels (so-called
VOLK_GNSSSDR)
and a profiler that will build a config file for the best SIMD architecture for
your processor. Run volk_gnsssdr_profile that is installed into $PREFIX/bin.
This program tests all known VOLK kernels for each architecture supported by the
processor. When finished, it will write to
$HOME/.volk_gnsssdr/volk_gnsssdr_config the best architecture for the VOLK
function. This file is read when using a function to know the best version of
the function to execute. It mimics GNU Radio's VOLK
library, so if you still have not run volk_profile, this is a good moment to
do so.
If you are using Eclipse as your development
environment, CMake can create the project for you. However, if the build
directory is a subdirectory of the source directory (as is the case of the
gnss-sdr/build folder), this is not supported well by Eclipse. It is strongly
recommended to use a build directory which is a sibling of the source directory.
Hence, type from the gnss-sdr root folder:
$ cd ..
$ mkdir eclipse && cd eclipse
$ cmake -G "Eclipse CDT4 - Unix Makefiles" -DCMAKE_ECLIPSE_GENERATE_SOURCE_PROJECT=TRUE -DCMAKE_ECLIPSE_VERSION=4.5 ../gnss-sdr
and then import the created project into Eclipse:
- Import project using Menu File -> Import.
- Select General -> Existing projects into workspace.
- Select your root directory: Browse and select your newly created
eclipse/directory. Keep "Copy projects into workspace" unchecked. - Click on "Finish" and you will get a fully functional Eclipse project.
After building the project, you will find the generated binaries at
eclipse/install.
Build OSMOSDR support (OPTIONAL)
Install the OsmoSDR library and GNU Radio's source block:
$ git clone git://git.osmocom.org/osmo-sdr.git
$ cd osmo-sdr/software/libosmosdr
$ mkdir build
$ cd build/
$ cmake ..
$ make
$ sudo make install
$ sudo ldconfig
$ cd ../..
$ git clone git://git.osmocom.org/gr-osmosdr
$ cd gr-osmosdr
$ mkdir build
$ cd build
$ cmake .. -Wno-dev
$ make
$ sudo make install
$ sudo ldconfig
Then, configure GNSS-SDR to build the Osmosdr_Signal_Source by:
$ cmake -DENABLE_OSMOSDR=ON ..
$ make
$ sudo make install
(in order to disable the Osmosdr_Signal_Source compilation, you can pass
-DENABLE_OSMOSDR=OFF to cmake and build GNSS-SDR again).
Build FMCOMMS2 based SDR Hardware support (OPTIONAL)
Install the libiio (>=v0.11), libad9361 (>=v0.1-1) libraries and gr-iio (>v0.3) gnuradio block:
$ sudo apt-get install libxml2-dev bison flex
$ git clone https://github.com/analogdevicesinc/libiio.git
$ cd libiio
$ mkdir build
$ cd build
$ cmake ..
$ make && sudo make install && sudo ldconfig
$ cd ../..
$ git clone https://github.com/analogdevicesinc/libad9361-iio.git
$ cd libad9361-iio
$ mkdir build
$ cd build
$ cmake ..
$ make && sudo make install && sudo ldconfig
$ cd ../..
$ git clone https://github.com/analogdevicesinc/gr-iio.git
$ cd gr-iio
$ mkdir build
$ cd build
$ cmake -DCMAKE_INSTALL_PREFIX=/usr ..
$ make && sudo make install && sudo ldconfig
$ cd ../..
Then configure GNSS-SDR to build the Fmcomms2_Signal_Source implementation:
$ cd gnss-sdr/build
$ cmake -DENABLE_FMCOMMS2=ON ..
$ make
$ sudo make install
or configure it to build Plutosdr_Signal_Source:
$ cmake -DENABLE_PLUTOSDR=ON ..
$ make
$ sudo make install
With Fmcomms2_Signal_Source you can use any SDR hardware based on
FMCOMMS2,
including the ADALM-PLUTO (PlutoSdr) by configuring correctly the .conf file.
The Plutosdr_Signal_Source offers a simpler manner to use the ADALM-PLUTO
because implements only a subset of FMCOMMS2's parameters valid for those
devices.
Build OpenCL support (OPTIONAL)
In order to enable the building of blocks that use OpenCL, type:
$ cmake -DENABLE_OPENCL=ON ..
$ make
$ sudo make install
Build CUDA support (OPTIONAL)
In order to enable the building of blocks that use CUDA, NVIDIA's parallel programming model that enables graphics processing unit (GPU) acceleration for data-parallel computations, first you need to install the CUDA Toolkit from NVIDIA Developers Download page. Make sure that the SDK samples build well. Then, build GNSS-SDR by doing:
$ cmake -DENABLE_CUDA=ON ..
$ make
$ sudo make install
Of course, you will also need a GPU that supports CUDA.
Build a portable binary
In order to build an executable that not depends on the specific SIMD instruction set that is present in the processor of the compiling machine, so other users can execute it in other machines without those particular sets, use:
$ cmake -DENABLE_GENERIC_ARCH=ON ..
$ make
$ sudo make install
Using this option, all SIMD instructions are exclusively accessed via VOLK, which automatically includes versions of each function for different SIMD instruction sets, then detects at runtime which to use, or if there are none, substitutes a generic, non-SIMD implementation.
More details can be found in our tutorial about GNSS-SDR configuration options at building time.
macOS
GNSS-SDR can be built on macOS (or the former Mac OS X), starting from 10.9 (Mavericks) and including 11 (Big Sur). If you still have not installed Xcode, do it now from the App Store (it's free). You will also need the Xcode Command Line Tools, which do not come by default in macOS versions older than Big Sur. If you are using an older version, please launch the Terminal, found in /Applications/Utilities/, and type:
$ xcode-select --install
Agree to Xcode license:
$ sudo xcodebuild -license
Software pre-requisites can be installed using either Macports or Homebrew.
Macports
First, install Macports. If you are upgrading from a previous installation, please follow the migration rules.
In a terminal, type:
$ sudo port selfupdate
$ sudo port upgrade outdated
$ sudo port install armadillo cmake gnuradio gnutls lapack libad9361-iio libiio \
matio pkgconfig protobuf3-cpp pugixml google-glog +gflags
$ sudo port install py37-mako
$ sudo port install doxygen +docs
You also might need to activate a Python installation. The list of installed versions can be retrieved with:
$ port select --list python
and you can activate a certain version by typing:
$ sudo port select --set python python37
Homebrew
First, install Homebrew. Paste this in a terminal prompt:
$ /usr/bin/ruby -e "$(curl -fsSL https://raw.githubusercontent.com/Homebrew/install/master/install)"
The script explains what it will do, and then it pauses before doing it. There are more installation options here.
Install pip3:
$ curl https://bootstrap.pypa.io/get-pip.py -o get-pip.py
$ sudo python3 get-pip.py
Install the required dependencies:
$ brew update && brew upgrade
$ brew install armadillo cmake hdf5 gflags glog gnuradio lapack libmatio log4cpp \
openssl pkg-config protobuf pugixml
$ pip3 install mako
$ brew install --cask mactex # when completed, restart Terminal
$ brew install graphviz doxygen
Other package managers
GNU Radio and other dependencies can also be installed using other package
managers than Macports, such as Fink.
Since the version of Python that ships with OS X is great for learning but it is
not good for development, you could have another Python executable in a
non-standard location. If that is the case, you need to inform GNSS-SDR's
configuration system by defining the PYTHON_EXECUTABLE variable as:
$ cmake -DPYTHON_EXECUTABLE=/path/to/bin/python3 ..
In case you have installed Macports in a non-standard location, you can use:
$ cmake -DCMAKE_PREFIX_PATH=/opt/local -DUSE_MACPORTS_PYTHON=/opt/local/bin/python ..
changing /opt/local by the base directory in which your software is installed.
The CMake script will create Makefiles that download, build and link Armadillo, Gflags, Glog, Matio, Protocol Buffers, PugiXML and Google Test on the fly at compile time if they are not detected in your machine.
Build GNSS-SDR
Finally, you are ready to clone the GNSS-SDR repository, configure and build the software:
$ git clone https://github.com/gnss-sdr/gnss-sdr
$ cd gnss-sdr/build
$ cmake ..
$ make
This will create three executables at gnss-sdr/install, namely gnss-sdr,
run_tests and volk_gnsssdr_profile. You can install the software receiver on
your system by doing:
$ sudo make install
Note, it is advisable not to run the install step in a homebrew environment.
The documentation can be built by:
$ make doc
and can be viewed doing:
$ open ./docs/html/index.html
GNSS-SDR comes with a library which is a module of the Vector-Optimized Library
of Kernels (so-called
VOLK_GNSSSDR)
and a profiler that will build a config file for the best SIMD architecture for
your processor. Run volk_gnsssdr_profile that is installed into $PREFIX/bin.
This program tests all known VOLK kernels for each architecture supported by the
processor. When finished, it will write to
$HOME/.volk_gnsssdr/volk_gnsssdr_config the best architecture for the VOLK
function. This file is read when using a function to know the best version of
the function to execute. It mimics GNU Radio's VOLK
library, so if you still have not run volk_profile, this is a good moment to
do so.
Other builds
-
Docker image: A technology providing operating-system-level virtualization to build, ship, and run distributed applications, whether on laptops, data center VMs, or the cloud. Visit https://github.com/carlesfernandez/docker-gnsssdr or https://github.com/carlesfernandez/docker-pybombs-gnsssdr for instructions.
-
Snap package: Snaps are Linux packages aimed for Ubuntu or Ubuntu-like distros. Visit https://github.com/carlesfernandez/snapcraft-sandbox for instructions, or directly get the software from the Snap Store:

- GNSS-SDR in embedded platforms: we provide a Software Development Kit (SDK) based on OpenEmbedded for cross-compiling GNSS-SDR in your desktop computer and for producing executables that can run in embedded platforms, such as Xilinx's Zynq and ZynqMP architectures, Raspberry Pi, and many others. Please check yocto-geniux for instructions on how to build bootable images.
Updating GNSS-SDR
If you cloned or forked GNSS-SDR some time ago, it is possible that some
developer has updated files at the Git repository. If you still have not done
so, add the upstream repository to the list of remotes:
$ git remote add upstream https://github.com/gnss-sdr/gnss-sdr.git
and then you can update your working copy by doing:
$ git checkout main # Switch to branch you want to update
$ git pull upstream main # Download the newest code from our repository
or, if you want to test the latest developments:
$ git checkout next
$ git pull upstream next
Before rebuilding the source code, it is safe (and recommended) to remove the remainders of old compilations:
$ rm -rf gnss-sdr/build/*
If you are interested in contributing to the development of GNSS-SDR, please check out how to do it.
There is a more controlled way to upgrade your repository, which is to use the
Git commands fetch and merge, as described in our
Git Tutorial.
Getting started
- After building the code, you will find the
gnss-sdrexecutable file at gnss-sdr/install. You can make it available everywhere else bysudo make install. Run the profilersvolk_profileandvolk_gnsssdr_profilefor testing all available VOLK kernels for each architecture supported by your processor. This only has to be done once. - In post-processing mode, you have to provide a captured GNSS signal file. 1.
The signal file can be easily recorded using the GNU Radio file sink in
gr_complex<float>mode. 2. You will need a GPS active antenna, a USRP and a suitable USRP daughter board to receive GPS L1 C/A signals. GNSS-SDR requires to have at least 2 MHz of bandwidth in 1.57542 GHz. (remember to enable the DC bias with the daughterboard jumper). We use a DBSRX2 to do the task, but you can try the newer Ettus' daughter boards as well. 3. The easiest way to capture a signal file is to use the GNU Radio Companion GUI. Only two blocks are needed: a USRP signal source connected to a complex float file sink. You need to tune the USRP central frequency and decimation factor using the USRP signal source properties box. We suggest using a decimation factor of 20 if you use the USRP2. This will give you 100/20 = 5 MSPS which will be enough to receive GPS L1 C/A signals. The front-end gain should also be configured. In our test with the DBSRX2 we obtained good results withG=50. 4. Capture at least 80 seconds of signal in open sky conditions. During the process, be aware of USRP driver buffer underruns messages. If your hard disk is not fast enough to write data at this speed you can capture it to a virtual RAM drive. 80 seconds of signal at 5 MSPS occupies less than 3 Gbytes usinggr_complex<float>. If you have no access to an RF front-end, you can download a sample raw data file (that contains GPS and Galileo signals) from here. - You are ready to configure the receiver to use your captured file among other
parameters:
- The default configuration file resides at /usr/local/share/gnss-sdr/conf/default.conf.
- You need to review/modify at least the following settings:
SignalSource.filename=(absolute or relative route to your GNSS signal captured file)GNSS-SDR.internal_fs_sps=(captured file sampling rate in samples per second)SignalSource.sampling_frequency=(captured file sampling rate in samples per second)SignalConditioner.sample_freq_in=(captured file sampling rate in samples per second)SignalConditioner.sample_freq_out=(captured file sampling rate in samples per second)
- The configuration file has in-line documentation, you can try to tune the number of channels and several receiver parameters. Store your .conf file in some working directory of your choice.
- Run the receiver invoking the configuration by
$ gnss-sdr --config_file=/path/to/my_receiver.confThe program reports the current status in text mode, directly to the terminal window. If all goes well, and GNSS-SDR is able to successfully track and decode at least 4 satellites, you will get PVT fixes. The program will write .kml, .geojson and RINEX files in the folder from whichgnss-sdrwas run. In addition to the console output, GNSS-SDR also writes log files at /tmp/ (configurable with the commandline flag./gnss-sdr --log_dir=/path/to/log).
For more information, check out our quick start guide.
Using GNSS-SDR
With GNSS-SDR, you can define your own receiver, work with captured raw data or
from an RF front-end, dump into files intermediate signals, or tune every single
algorithm used in the signal processing. All the configuration is done in a
single file. Those configuration files reside at the gnss-sdr/conf/
folder (or at /usr/local/share/gnss-sdr/conf if you installed the program). By
default, the executable gnss-sdr will read the configuration available at
gnss-sdr/conf/gnss-sdr.conf (or at (usr/local/share/gnss-sdr/conf/default.conf
if you installed the program). You can edit that file to fit your needs, or even
better, define a new my_receiver.conf file with your own configuration. This
new receiver can be generated by invoking gnss-sdr with the --config_file flag
pointing to your configuration file:
$ gnss-sdr --config_file=/path/to/my_receiver.conf
You can use a single configuration file for processing different data files,
specifying the file to be processed with the --signal_source flag:
$ gnss-sdr --config_file=../conf/my_receiver.conf --signal_source=../data/my_captured_data.dat
This will override the SignalSource.filename specified in the configuration
file.
Control plane

GNSS-SDR's main method initializes the logging library, processes the command line flags, if any, provided by the user and instantiates a ControlThread object. Its constructor reads the configuration file, creates a control queue, and creates a flowgraph according to the configuration. Then, the program's main method calls the run() method of the instantiated object, an action that connects the flowgraph and starts running it. After that, and until a stop message is received, it reads control messages sent by the receiver's modules through a safe-thread queue and processes them. Finally, when a stop message is received, the main method executes the destructor of the ControlThread object, which deallocates memory, does other cleanup, and exits the program.
The GNSSFlowgraph class is responsible
for preparing the graph of blocks according to the configuration, running it,
modifying it during run-time, and stopping it. Blocks are identified by their
role. This class knows which roles it has to instantiate and how to connect
them. It relies on the configuration to get the correct instances of the roles
it needs and then it applies the connections between GNU Radio blocks to make
the graph ready to be started. The complexity related to managing the blocks and
the data stream is handled by GNU Radio's gr::top_block class. GNSSFlowgraph
wraps the gr::top_block instance so we can take advantage of the
gnss_block_factory (see below), the configuration system, and the processing
blocks. This class is also responsible for applying changes to the configuration
of the flowgraph during run-time, dynamically reconfiguring channels: it selects
the strategy for selecting satellites. This can range from a sequential search
over all the satellites' ID to other more efficient approaches.
The Control Plane is in charge of creating a flowgraph according to the configuration and then managing the modules. Configuration allows users to define in an easy way their own custom receiver by specifying the flowgraph (type of signal source, number of channels, algorithms to be used for each channel and each module, strategies for satellite selection, type of output format, etc.). Since it is difficult to foresee what future module implementations will be needed in terms of configuration, we used a very simple approach that can be extended without a major impact on the code. This can be achieved by simply mapping the names of the variables in the modules with the names of the parameters in the configuration.
Configuration
Properties are passed around within the program using the ConfigurationInterface class. There are two implementations of this interface: FileConfiguration and InMemoryConfiguration. FileConfiguration reads the properties (pairs of property name and value) from a file and stores them internally. InMemoryConfiguration does not read from a file; it remains empty after instantiation and property values and names are set using the set property method. FileConfiguration is intended to be used in the actual GNSS-SDR application whereas InMemoryConfiguration is intended to be used in tests to avoid file-dependency in the file system. Classes that need to read configuration parameters will receive instances of ConfigurationInterface from where they will fetch the values. For instance, parameters related to SignalSource should look like this:
SignalSource.parameter1=value1
SignalSource.parameter2=value2
The name of these parameters can be anything but one reserved word: implementation. This parameter indicates in its value the name of the class that has to be instantiated by the factory for that role. For instance, if our signal source is providing data already at baseband and thus we want to use the implementation Pass_Through for module SignalConditioner, the corresponding line in the configuration file would be
SignalConditioner.implementation=Pass_Through
Since the configuration is just a set of property names and values without any meaning or syntax, the system is very versatile and easily extendable. Adding new properties to the system only implies modifications in the classes that will make use of these properties. In addition, the configuration files are not checked against any strict syntax so it is always in a correct status (as long as it contains pairs of property names and values in the INI format).
GNSS block factory
Hence, the application defines a simple accessor class to fetch the configuration pairs of values and passes them to a factory class called GNSSBlockFactory. This factory decides, according to the configuration, which class needs to be instantiated and which parameters should be passed to the constructor. Hence, the factory encapsulates the complexity of blocks' instantiation. With that approach, adding a new block that requires new parameters will be as simple as adding the block class and modifying the factory to be able to instantiate it. This loose coupling between the blocks' implementations and the syntax of the configuration enables extending the application capacities to a high degree. It also allows producing fully customized receivers, for instance a testbed for acquisition algorithms, and to place observers at any point of the receiver chain.
More information can be found at the Control Plane page.
Signal Processing plane
GNU Radio's class gr::basic_block is the abstract base class for all signal
processing blocks, a bare abstraction of an entity that has a name and a set of
inputs and outputs. It is never instantiated directly; rather, this is the
abstract parent class of both gr::hier_block2, which is a recursive container
that adds or removes processing or hierarchical blocks to the internal graph,
and gr::block, which is the abstract base class for all the processing blocks.
A signal processing flow is constructed by creating a tree of hierarchical blocks, which at any level may also contain terminal nodes that actually implement signal processing functions.
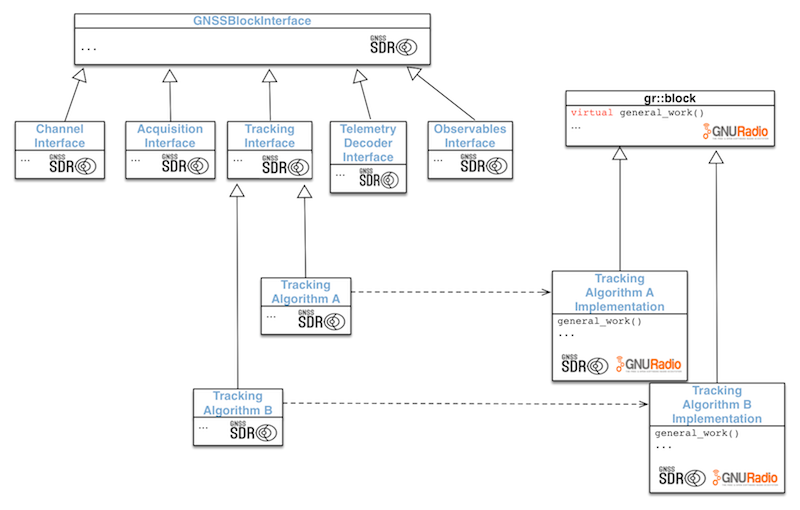
Class gr::top_block is the top-level hierarchical block representing a
flowgraph. It defines GNU Radio runtime functions used during the execution of
the program: run(), start(), stop(), wait(), etc. A subclass called
GNSSBlockInterface is the common
interface for all the GNSS-SDR modules. It defines pure virtual methods, that
are required to be implemented by a derived class.
Subclassing GNSSBlockInterface, we defined interfaces for the GNSS receiver blocks depicted in the figure above. This hierarchy provides the definition of different algorithms and different implementations, which will be instantiated according to the configuration. This strategy allows multiple implementations to share a common interface, achieving the objective of decoupling interfaces from implementations: it defines a family of algorithms, encapsulates each one, and makes them interchangeable. Hence, we let the algorithm vary independently of the program that uses it.
Internally, GNSS-SDR makes use of the complex data types defined by VOLK. They are fundamental for handling sample streams in which samples are complex numbers with real and imaginary components of 8, 16, or 32 bits, common formats delivered by GNSS (and generic SDR) radio frequency front-ends. The following list shows the data type names that GNSS-SDR exposes through the configuration file:
byte: Signed integer, 8-bit two's complement number ranging from -128 to 127. C++ type name:int8_t.short: Signed integer, 16-bit two's complement number ranging from -32768 to 32767. C++ type name:int16_t.float: Defines numbers with fractional parts, can represent values ranging from approx. 1.5e-45 to 3.4e+38 with a precision of 7 digits (32 bits). C++ type name:float.ibyte: Interleaved (I&Q) stream of samples of typebyte. C++ type name:int8_t.ishort: Interleaved (I&Q) stream of samples of typeshort. C++ type name:int16_t.cbyte: Complex samples, with real and imaginary parts of typebyte. C++ type name:lv_8sc_t.cshort: Complex samples, with real and imaginary parts of typeshort. C++ type name:lv_16sc_t.gr_complex: Complex samples, with real and imaginary parts of typefloat. C++ type name:std::complex<float>.
More information about the available processing blocks and their configuration parameters can be found at the Signal Processing Blocks documentation page.
Signal Source
The inputs of a software receiver are the raw bits that come out from the front-end's analog-to-digital converter (ADC). Those bits can be read from a file stored in the hard disk or directly in real-time from a hardware device through USB or Ethernet buses.
The Signal Source module is in charge of implementing the hardware driver, that is, the portion of the code that communicates with the RF front-end and receives the samples coming from the ADC. This communication is usually performed through USB or Ethernet buses. Since real-time processing requires a highly optimized implementation of the whole receiver, this module also allows reading samples from a file stored in a hard disk, and thus processing without time constraints. Relevant parameters of those samples are the intermediate frequency (or baseband I&Q components), the sampling rate, and the number of bits per sample, which must be specified by the user in the configuration file.
This module also performs bit-depth adaptation, since most of the existing RF front-ends provide samples quantized with 2 or 3 bits, while operations inside the processor are performed on 32- or 64-bit words, depending on its architecture. Although there are implementations of the most intensive computational processes (mainly correlation) that take advantage of specific data types and architectures for the sake of efficiency, the approach is processor-specific and hardly portable. We suggest keeping signal samples in standard data types and letting the compiler select the best library version (implemented using SIMD or any other processor-specific technology) of the required routines for a given processor.
Example: File Signal Source
The user can configure the receiver for reading from a file, setting in the configuration file the data file location, sample format, and the sampling frequency and intermediate frequency at what the signal was originally captured.
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=File_Signal_Source
SignalSource.filename=/home/user/gnss-sdr/data/my_capture.dat
SignalSource.item_type=gr_complex
SignalSource.sampling_frequency=4000000 ; Sampling frequency in samples per second (Sps)
Type gr_complex refers to a GNU Radio typedef equivalent to
std::complex<float>. In order to save some storage space, you might want to
store your signal in a more efficient format such as an I/Q interleaved short
integer sample stream. In that case, change the corresponding line to:
SignalSource.item_type=ishort
In this latter case, you will need to convert the interleaved I/Q samples to a complex stream via Data Type Adapter block (see below).
Example: Two-bit packed file source
Sometimes, samples are stored in files with a format that is not in the list of
native types supported by the File_Signal_Source implementation (i.e, it is
not among byte, ibyte, short, ishort, float, or gr_complex). This is
the case of 2-bit samples, which is a common format delivered by GNSS RF
front-ends. The Two_Bit_Packed_File_Signal_Source implementation allows
reading two-bit length samples from a file. The data is assumed to be packed as
bytes item_type=byte or shorts item_type=short so that there are 4 two-bit
samples in each byte. The two-bit values are assumed to have the following
interpretation:
| b_1 | b_0 | Value |
|---|---|---|
| 0 | 0 | +1 |
| 0 | 1 | +3 |
| 1 | 0 | -3 |
| 1 | 1 | -1 |
Within a byte the samples may be packed in big-endian big_endian_bytes=true
(if the most significant byte value is stored at the memory location with the
lowest address, the next byte value in significance is stored at the following
memory location, and so on) or little-endian big_endian_bytes=false (if the
least significant byte value is at the lowest address, and the other bytes
follow in increasing order of significance). If the order is big-endian then the
most significant two bits will form the first sample output. Otherwise, the
least significant two bits will be used.
Additionally, the samples may be either real sample_type=real, or complex. If
the sample type is complex, then the samples are either stored in the order:
real, imag, real, imag, ... sample_type=iq or in the order: imag, real, imag,
real, ... sample_type=qi.
Finally, if the data is stored as shorts item_type=short, then it may be
stored in either big-endian big_endian_items=true or little-endian
big_endian_items=false. If the shorts are big-endian then the 2nd byte in each
short is output first.
The output data type is either float or gr_complex depending on whether or
not sample_type is real. Example:
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=Two_Bit_Packed_File_Signal_Source
SignalSource.filename=/data/my_capture.datz
SignalSource.item_type=short
SignalSource.sampling_frequency=60000000
SignalSource.freq=1575468750
SignalSource.samples=6000000000 ; Notice that 0 indicates the entire file.
SignalSource.repeat=false
SignalSource.dump=false
SignalSource.dump_filename=./signal_source.dat
SignalSource.enable_throttle_control=false
SignalSource.sample_type=iq
SignalSource.big_endian_items=true
SignalSource.big_endian_bytes=false
Example: UHD Signal Source
The user may prefer to use a UHD-compatible RF front-end and try real-time processing. For instance, for a USRP1 + DBSRX daughterboard, use:
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=UHD_Signal_Source
SignalSource.item_type=gr_complex
SignalSource.sampling_frequency=4000000 ; Sampling frequency in [Hz]
SignalSource.freq=1575420000 ; RF front-end center frequency in [Hz]
SignalSource.gain=60 ; Front-end gain in dB
SignalSource.subdevice=B:0 ; UHD subdevice specification (for USRP1 use A:0 or B:0, for USRP B210 use A:0)
Example: Configuring the USRP X300/X310 with two front-ends for receiving signals in L1 and L2 bands
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=UHD_Signal_Source
SignalSource.device_address=192.168.40.2 ; Put your USRP IP address here
SignalSource.item_type=gr_complex
SignalSource.RF_channels=2
SignalSource.sampling_frequency=4000000
SignalSource.subdevice=A:0 B:0
;######### RF Channels specific settings ######
SignalSource.freq0=1575420000
SignalSource.gain0=50
SignalSource.samples0=0
SignalSource.dump0=false
SignalSource.freq1=1227600000
SignalSource.gain1=50
SignalSource.samples1=0
SignalSource.dump1=false
Example: OsmoSDR-compatible Signal Source
OsmoSDR is a small form-factor, inexpensive software defined radio project. It provides a driver for several front-ends, such as RTL-based dongles, HackRF, bladeRF, LimeSDR, etc. Note that not all the OsmoSDR-compatible devices can work as radio frequency front-ends for proper GNSS signal reception, please check the specifications. For suitable RF front-ends, you can use:
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=Osmosdr_Signal_Source
SignalSource.item_type=gr_complex
SignalSource.sampling_frequency=2000000
SignalSource.freq=1575420000
SignalSource.rf_gain=40
SignalSource.if_gain=30
SignalSource.enable_throttle_control=false
SignalSource.osmosdr_args=hackrf,bias=1
For RTL-SDR Blog V3 dongles, the arguments are:
SignalSource.osmosdr_args=rtl,bias=1
and for LimeSDR:
SignalSource.osmosdr_args=driver=lime,soapy=0
In case of using a Zarlink's RTL2832 based DVB-T receiver, you can even use the
rtl_tcp I/Q server in order to use the USB dongle remotely. In a terminal,
type:
$ rtl_tcp -a 127.0.0.1 -p 1234 -f 1575420000 -g 0 -s 2000000
and use the following configuration:
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=RtlTcp_Signal_Source
SignalSource.item_type=gr_complex
SignalSource.sampling_frequency=1200000
SignalSource.freq=1575420000
SignalSource.gain=40
SignalSource.rf_gain=40
SignalSource.if_gain=30
SignalSource.AGC_enabled=false
SignalSource.samples=0
SignalSource.enable_throttle_control=false
SignalSource.address=127.0.0.1
SignalSource.port=1234
SignalSource.swap_iq=false
SignalSource.repeat=false
SignalSource.dump=false
SignalSource.dump_filename=../data/signal_source.dat
Example for a dual-frequency receiver:
;######### SIGNAL_SOURCE CONFIG ############
SignalSource.implementation=UHD_Signal_Source
SignalSource.device_address=192.168.40.2 ; Put your USRP IP address here
SignalSource.item_type=gr_complex
SignalSource.RF_channels=2
SignalSource.sampling_frequency=4000000
SignalSource.subdevice=A:0 B:0
;######### RF Channels specific settings ######
SignalSource.freq0=1575420000
SignalSource.gain0=50
SignalSource.samples0=0
SignalSource.dump0=false
SignalSource.freq1=1227600000
SignalSource.gain1=50
SignalSource.samples1=0
SignalSource.dump1=false
More documentation and examples are available at the Signal Source Blocks page.
Signal Conditioner

The signal conditioner is in charge of resampling the signal and delivering a reference sample rate to the downstream processing blocks, acting as a facade between the signal source and the synchronization channels, providing a simplified interface to the input signal. In the case of multiband front-ends, this module would be in charge of providing a separated data stream for each band.
If your signal source is providing baseband signal samples of type gr_complex
at 4 Msps, you can bypass the Signal Conditioner block by:
SignalConditioner.implementation=Pass_Through
If you need to adapt some aspect of your signal, you can enable the Signal Conditioner and configure three internal blocks: a data type adapter, an input signal, and a resampler.
;#[Signal_Conditioner] enables this block. Then you have to configure [DataTypeAdapter], [InputFilter] and [Resampler] blocks
SignalConditioner.implementation=Signal_Conditioner
More documentation at the Signal Conditioner Blocks page.
Data type adapter
This block changes the type of input data samples. If your signal source
delivers data samples of type short, you can use this block to convert them to
gr_complex like this:
;######### DATA_TYPE_ADAPTER CONFIG ############
;#implementation: [Pass_Through] disables this block
DataTypeAdapter.implementation=Ishort_To_Complex
More documentation at the Data Type Adapter Blocks page.
Input filter
This block filters the input data. It can be combined with frequency translation for IF signals. The computation of the filter taps is based on parameters of GNU Radio's function pm_remez, which calculates the optimal (in the Chebyshev/minimax sense) FIR filter impulse response given a set of band edges, the desired response on those bands, and the weight given to the error in those bands.
The block can be configured like this:
;######### INPUT_FILTER CONFIG ############
;#implementation: Use [Pass_Through] or [Fir_Filter] or [Freq_Xlating_Fir_Filter]
;#[Pass_Through] disables this block
;#[Fir_Filter] enables a FIR Filter
;#[Freq_Xlating_Fir_Filter] enables FIR filter and a composite frequency translation that shifts IF down to zero Hz.
InputFilter.implementation=Freq_Xlating_Fir_Filter
InputFilter.dump=false ; #dump: Dump the filtered data to a file.
InputFilter.dump_filename=../data/input_filter.dat ; #dump_filename: Log path and filename.
InputFilter.input_item_type=gr_complex
InputFilter.output_item_type=gr_complex
InputFilter.taps_item_type=float
InputFilter.number_of_taps=5 ; #number_of_taps: Number of taps in the filter. Increasing this parameter increases the processing time
InputFilter.number_of_bands=2 ; #number_of_bands: Number of frequency bands in the filter.
; Frequency is in the range [0, 1], with 1 being the Nyquist frequency (Fs/2)
; The number of band_begin and band_end elements must match the number of bands
InputFilter.band1_begin=0.0
InputFilter.band1_end=0.85
InputFilter.band2_begin=0.90
InputFilter.band2_end=1.0
;#ampl: desired amplitude at the band edges.
;#The number of ampl_begin and ampl_end elements must match the number of bands
InputFilter.ampl1_begin=1.0
InputFilter.ampl1_end=1.0
InputFilter.ampl2_begin=0.0
InputFilter.ampl2_end=0.0
;#band_error: weighting applied to each band (usually 1).
;#The number of band_error elements must match the number of bands
InputFilter.band1_error=1.0
InputFilter.band2_error=1.0
;#filter_type: one of "bandpass", "hilbert" or "differentiator"
InputFilter.filter_type=bandpass
;#grid_density: determines how accurately the filter will be constructed.
;The minimum value is 16; higher values are slower to compute the filter.
InputFilter.grid_density=16
;#The following options are used only in Freq_Xlating_Fir_Filter implementation.
;#InputFilter.IF is the intermediate frequency (in Hz) shifted down to zero Hz
InputFilter.sampling_frequency=4000000
InputFilter.IF=0
InputFilter.decimation_factor=1
More documentation at the Input Filter Blocks page.
Resampler
This block resamples the input data stream. The Direct_Resampler block
implements a nearest neighbourhood interpolation:
;######### RESAMPLER CONFIG ############
;#implementation: Use [Pass_Through] or [Direct_Resampler]
;#[Pass_Through] disables this block
Resampler.implementation=Direct_Resampler
Resampler.dump=false ; Dumps the resampled data to a file.
Resampler.dump_filename=../data/resampler.dat ; log path and filename.
Resampler.item_type=gr_complex
Resampler.sample_freq_in=8000000 ; sample frequency of the input signal
Resampler.sample_freq_out=4000000 ; desired sample frequency of the output signal
More documentation at the Resampler Blocks page.
Channel
A channel encapsulates all signal processing devoted to a single satellite. Thus, it is a large composite object which encapsulates the acquisition, tracking, and navigation data decoding modules. As a composite object, it can be treated as a single entity, meaning that it can be easily replicated. Since the number of channels is selectable by the user in the configuration file, this approach helps to improve the scalability and maintainability of the receiver.
Each channel must be assigned to a GNSS signal, according to the following identifiers:
| Signal | Identifier |
|---|---|
| GPS L1 C/A | 1C |
| Galileo E1b/c | 1B |
| Glonass L1 C/A | 1G |
| Beidou B1I | B1 |
| Galileo E6B | E6 |
| Beidou B3I | B3 |
| GPS L2 L2C(M) | 2S |
| Glonass L2 C/A | 2G |
| GPS L5 | L5 |
| Galileo E5a | 5X |
| Galileo E5b | 7X |
Example: Eight GPS L1 C/A channels.
;######### CHANNELS GLOBAL CONFIG ############
Channels_1C.count=8 ; Number of available GPS L1 C/A channels.
Channels_1B.count=0 ; Number of available Galileo E1B channels.
Channels.in_acquisition=1 ; Number of channels simultaneously acquiring
Channel.signal=1C ;
Example: Four GPS L1 C/A and four Galileo E1B channels.
;######### CHANNELS GLOBAL CONFIG ############
Channels_1C.count=4 ; Number of available GPS L1 C/A channels.
Channels_1B.count=4 ; Number of available Galileo E1B channels.
Channels.in_acquisition=1 ; Number of channels simultaneously acquiring
Channel0.signal=1C ;
Channel1.signal=1C ;
Channel2.signal=1C ;
Channel3.signal=1C ;
Channel4.signal=1B ;
Channel5.signal=1B ;
Channel6.signal=1B ;
Channel7.signal=1B ;
This module is also in charge of managing the interplay between acquisition and tracking. Acquisition can be initialized in several ways, depending on the prior information available (called cold start when the receiver has no information about its position nor the satellites' almanac; warm start when a rough location and the approximate time of day are available, and the receiver has a recently recorded almanac broadcast; or hot start when the receiver was tracking a satellite and the signal line of sight broke for a short period of time, but the ephemeris and almanac data is still valid, or this information is provided by other means), and an acquisition process can finish deciding that the satellite is not present, that longer integration is needed in order to confirm the presence of the satellite, or declaring the satellite present. In the latter case, the acquisition process should stop and trigger the tracking module with coarse estimations of the synchronization parameters. The mathematical abstraction used to design this logic is known as a finite state machine (FSM), which is a behavior model composed of a finite number of states, transitions between those states, and actions.
The abstract class ChannelInterface represents an interface to a channel GNSS block. Check Channel for an actual implementation.
More documentation at the Channels page.
Acquisition
The first task of a GNSS receiver is to detect the presence or absence of
in-view satellites. This is done by the acquisition system process, which also
provides a coarse estimation of two signal parameters: the frequency shift with
respect to the nominal frequency, and a delay term that allows the receiver to
create a local code aligned with the incoming code.
AcquisitionInterface is the
common interface for all the acquisition algorithms and their corresponding
implementations. Algorithms' interface, which may vary depending on the use of
information external to the receiver, such as in Assisted GNSS, is defined in
classes referred to as adapters. These adapters wrap the GNU Radio blocks
interface into a compatible interface expected by AcquisitionInterface. This
allows the use of existing GNU Radio blocks derived from gr::block, and
ensures that newly developed implementations will also be reusable in other GNU
Radio-based applications. Moreover, it adds still another layer of abstraction,
since each given acquisition algorithm can have different implementations (for
instance using different numerical libraries). In such a way, implementations
can be continuously improved without having any impact neither on the algorithm
interface nor the general acquisition interface.
Check GpsL1CaPcpsAcquisition and GalileoE1PcpsAmbiguousAcquisition for examples of adapters from a Parallel Code Phase Search (PCPS) acquisition block, and pcps_acquisition_cc for an example of a block implementation. The source code of all the available acquisition algorithms is located at:
|-gnss-sdr
|---src
|-----algorithms
|-------acquisition
|---------adapters <- Adapters of the processing blocks to an AcquisitionInterface
|---------gnuradio_blocks <- Signal processing blocks implementation
The user can select a given implementation for the algorithm to be used in each receiver channel, as well as their parameters, in the configuration file. For a GPS L1 C/A receiver:
;######### ACQUISITION GLOBAL CONFIG ############
Acquisition_1C.implementation=GPS_L1_CA_PCPS_Acquisition ; Acquisition algorithm selection for this channel
Acquisition_1C.item_type=gr_complex
Acquisition_1C.coherent_integration_time_ms=1 ; Signal block duration for the acquisition signal detection [ms]
Acquisition_1C.threshold=2.5 ; Acquisition threshold
Acquisition_1C.pfa=0.01 ; Acquisition false alarm probability. This option overrides the threshold option.
Acquisition_1C.doppler_max=10000 ; Maximum expected Doppler shift [Hz]
Acquisition_1C.doppler_step=500 ; Doppler step in the grid search [Hz]
Acquisition_1C.dump=false ; Enables internal data file logging [true] or [false]
Acquisition_1C.dump_filename=./acq_dump.dat ; Log path and filename
and, for Galileo E1B channels:
;######### GALILEO ACQUISITION CONFIG ############
Acquisition_1B.implementation=Galileo_E1_PCPS_Ambiguous_Acquisition
Acquisition_1B.item_type=gr_complex
Acquisition_1B.coherent_integration_time_ms=4
Acquisition_1B.pfa=0.008
Acquisition_1B.doppler_max=15000
Acquisition_1B.doppler_step=125
Acquisition_1B.dump=false
Acquisition_1B.dump_filename=./acq_dump.dat
More documentation at the Acquisition Blocks page.
Tracking
When a satellite is declared present, the parameters estimated by the acquisition module are then fed to the receiver tracking module, which represents the second stage of the signal processing unit, aiming to perform a local search for accurate estimates of code delay and carrier phase, and following their eventual variations.
Again, a class hierarchy consisting of a TrackingInterface class and subclasses implementing algorithms provides a way of testing different approaches, with full access to their parameters. Check GpsL1CaDllPllTracking or GalileoE1DllPllVemlTracking for examples of adapters, and Gps_L1_Ca_Dll_Pll_Tracking_cc for an example of a signal processing block implementation. There are also available some useful classes and functions for signal tracking; take a look at cpu_multicorrelator.h, lock_detectors.h, tracking_discriminators.h or tracking_2nd_DLL_filter.h.
The source code of all the available tracking algorithms is located at:
|-gnss-sdr
|---src
|-----algorithms
|-------tracking
|---------adapters <- Adapters of the processing blocks to a TrackingInterface
|---------gnuradio_blocks <- Signal processing blocks implementation
|---------libs <- libraries of tracking objects (e.g. correlators, discriminators, and so on)
The user can select a given implementation for the algorithm to be used in all the tracking blocks, as well as its parameters, in the configuration file. For instance, for GPS l1 channels:
;######### TRACKING GPS L1 CONFIG ############
Tracking_1C.implementation=GPS_L1_CA_DLL_PLL_Tracking
Tracking_1C.item_type=gr_complex
Tracking_1C.pll_bw_hz=50.0 ; PLL loop filter bandwidth [Hz]
Tracking_1C.dll_bw_hz=2.0 ; DLL loop filter bandwidth [Hz]
Tracking_1C.pll_filter_order=3 ; PLL loop filter order [2] or [3]
Tracking_1C.dll_filter_order=2 ; DLL loop filter order [1], [2] or [3]
Tracking_1C.early_late_space_chips=0.5 ; correlator early-late space [chips].
Tracking_1C.dump=false ; Enable internal binary data file logging [true] or [false]
Tracking_1C.dump_filename=./tracking_ch_ ; Log path and filename. Notice that the tracking channel will add "x.dat" where x is the channel number.
and, for Galileo E1B channels:
;######### TRACKING GALILEO E1B CONFIG ############
Tracking_1B.implementation=Galileo_E1_DLL_PLL_VEML_Tracking
Tracking_1B.item_type=gr_complex
Tracking_1B.pll_bw_hz=15.0;
Tracking_1B.dll_bw_hz=2.0;
Tracking_1B.pll_filter_order=3 ; PLL loop filter order [2] or [3]
Tracking_1B.dll_filter_order=2 ; DLL loop filter order [1], [2] or [3]
Tracking_1B.early_late_space_chips=0.15;
Tracking_1B.very_early_late_space_chips=0.6;
Tracking_1B.dump=false
Tracking_1B.dump_filename=../data/veml_tracking_ch_
More documentation at the Tracking Blocks page.
Decoding of the navigation message
Most of GNSS signal links are modulated by a navigation message containing the time the message was transmitted, orbital parameters of satellites (also known as ephemeris), and an almanac (information about the general system health, rough orbits of all satellites in the network as well as data related to error correction). Navigation data bits are structured in words, pages, subframes, frames, and superframes. Sometimes, bits corresponding to a single parameter are spread over different words, and values extracted from different frames are required for proper decoding. Some words are for synchronization purposes, others for error control, and others contain actual information. There are also error control mechanisms, from parity checks to forward error correction (FEC) encoding and interleaving, depending on the system. All this decoding complexity is managed by a finite state machine.
The common interface is TelemetryDecoderInterface. Check GpsL1CaTelemetryDecoder for an example of the GPS L1 NAV message decoding adapter, and gps_l1_ca_telemetry_decoder_cc for an actual implementation of a signal processing block. Configuration example:
;######### TELEMETRY DECODER CONFIG ############
TelemetryDecoder_1C.implementation=GPS_L1_CA_Telemetry_Decoder
TelemetryDecoder_1C.dump=false
In case you are configuring a multi-system receiver, you will need to decimate the one with the fastest code rate in order to get both data streams synchronized. For instance, for hybrid GPS L1 / Galileo E1B receivers:
;######### TELEMETRY DECODER GPS L1 CONFIG ############
TelemetryDecoder_1C.implementation=GPS_L1_CA_Telemetry_Decoder
TelemetryDecoder_1C.dump=false
;######### TELEMETRY DECODER GALILEO E1B CONFIG ############
TelemetryDecoder_1B.implementation=Galileo_E1B_Telemetry_Decoder
TelemetryDecoder_1B.dump=false
More documentation at the Telemetry Decoder Blocks page.
Observables
GNSS systems provide different kinds of observations. The most commonly used are the code observations, also called pseudoranges. The pseudo comes from the fact that on the receiver side the clock error is unknown and thus the measurement is not a pure range observation. High-accuracy applications also use the carrier phase observations, which are based on measuring the difference between the carrier phase transmitted by the GNSS satellites and the phase of the carrier generated in the receiver. Both observables are computed from the outputs of the tracking module and the decoding of the navigation message. This module collects all the data provided by every tracked channel, aligns all received data into a coherent set, and computes the observables.
The common interface is ObservablesInterface.
Configuration example:
;######### OBSERVABLES CONFIG ############
Observables.implementation=Hybrid_Observables
Observables.dump=false
Observables.dump_filename=./observables.dat
More documentation at the Observables Blocks page.
Computation of Position, Velocity, and Time
Although data processing for obtaining high-accuracy PVT solutions is out of the scope of GNSS-SDR, we provide a module that can compute position fixes (stored in GIS-friendly formats such as GeoJSON, GPX, and KML, or transmitted via serial port as NMEA 0183 messages), and leaves room for more sophisticated positioning methods by storing observables and navigation data in RINEX files (v2.11 or v3.02), and generating RTCM 3.2 messages that can be disseminated through the Internet in real-time.
The common interface is PvtInterface.
Configuration example:
;######### PVT CONFIG ############
PVT.implementation=RTKLIB_PVT
PVT.positioning_mode=Single ; options: Single, Static, Kinematic, PPP_Static, PPP_Kinematic
PVT.iono_model=Broadcast ; options: OFF, Broadcast
PVT.trop_model=Saastamoinen ; options: OFF, Saastamoinen
PVT.rinex_version=2 ; options: 2 or 3
PVT.output_rate_ms=100 ; Period in [ms] between two PVT outputs
PVT.display_rate_ms=500 ; Position console print (std::out) interval [ms].
PVT.nmea_dump_filename=./gnss_sdr_pvt.nmea ; NMEA log path and filename
PVT.flag_nmea_tty_port=false ; Enables the NMEA log to a serial TTY port
PVT.nmea_dump_devname=/dev/pts/4 ; serial device descriptor for NMEA logging
PVT.flag_rtcm_server=true ; Enables or disables a TCP/IP server dispatching RTCM messages
PVT.flag_rtcm_tty_port=false ; Enables the RTCM log to a serial TTY port
PVT.rtcm_dump_devname=/dev/pts/1 ; serial device descriptor for RTCM logging
PVT.rtcm_tcp_port=2101
PVT.rtcm_MT1019_rate_ms=5000
PVT.rtcm_MT1045_rate_ms=5000
PVT.rtcm_MT1097_rate_ms=1000
PVT.rtcm_MT1077_rate_ms=1000
Notes on the output formats:
-
GeoJSON is a geospatial data interchange format based on JavaScript Object Notation (JSON) supported by numerous mapping and GIS software packages, including OpenLayers, Leaflet, MapServer, GeoServer, GeoDjango, GDAL, and CartoDB. It is also possible to use GeoJSON with PostGIS and Mapnik, both of which handle the format via the GDAL OGR conversion library. The Google Maps Javascript API v3 directly supports the integration of GeoJSON data layers, and GitHub also supports GeoJSON rendering.
-
KML (Keyhole Markup Language) is an XML grammar used to encode and transport representations of geographic data for display in an earth browser. KML is an open standard officially named the OpenGIS KML Encoding Standard (OGC KML), and it is maintained by the Open Geospatial Consortium, Inc. (OGC). KML files can be displayed in geobrowsers such as Google Earth, Marble, osgEarth, or used with the NASA World Wind SDK for Java.
-
GPX (the GPS Exchange Format) is a lightweight XML data format for the interchange of GPS data (waypoints, routes, and tracks) between applications and Web services on the Internet. The format is open and can be used without the need to pay license fees, and it is supported by a large list of software tools.
-
NMEA 0183 is a combined electrical and data specification for communication between marine electronics such as echo sounder, sonars, anemometer, gyrocompass, autopilot, GPS receivers, and many other types of instruments. It has been defined by, and is controlled by, the U.S. National Marine Electronics Association. The NMEA 0183 standard uses a simple ASCII, serial communications protocol that defines how data are transmitted in a sentence from one talker to multiple listeners at a time. Through the use of intermediate expanders, a talker can have a unidirectional conversation with a nearly unlimited number of listeners, and using multiplexers, multiple sensors can talk to a single computer port. At the application layer, the standard also defines the contents of each sentence (message) type, so that all listeners can parse messages accurately. Those messages can be sent through the serial port (that could be for instance a Bluetooth link) and be used/displayed by a number of software applications such as gpsd, JOSM, OpenCPN, and many others (and maybe running on other devices).
-
RINEX (Receiver Independent Exchange Format) is an interchange format for raw satellite navigation system data, covering observables and the information contained in the navigation message broadcast by GNSS satellites. This allows the user to post-process the received data to produce a more accurate result (usually with other data unknown to the original receiver, such as better models of the atmospheric conditions at time of measurement). RINEX files can be used by software packages such as GNSSTK, RTKLIB, and gLAB. GNSS-SDR by default generates RINEX version 3.02. If 2.11 is needed, it can be requested through the
rinex_versionparameter in the configuration file:
PVT.rinex_version=2
- RTCM SC-104 provides standards that define the data structure for
differential GNSS correction information for a variety of differential
correction applications. Developed by the Radio Technical Commission for
Maritime Services
(RTCM),
they have become an industry standard for the communication of correction
information. GNSS-SDR implements RTCM version 3.2, defined in the document
RTCM 10403.2, Differential GNSS (Global Navigation Satellite Systems)
Services - Version 3 (February 1, 2013), which can be
purchased online.
By default, the generated RTCM binary messages are dumped into a text file in
hexadecimal format. However, GNSS-SDR is equipped with a TCP/IP server, acting
as an NTRIP source that can feed an NTRIP server. NTRIP (Networked Transport
of RTCM via Internet Protocol) is an open standard protocol that can be freely
downloaded from
BKG,
and it is designed for disseminating differential correction data (e.g. in
the RTCM-104 format) or other kinds of GNSS streaming data to stationary or
mobile users over the Internet. The TCP/IP server can be enabled by setting
PVT.flag_rtcm_server=truein the configuration file, and will be active during the execution of the software receiver. By default, the server will operate on port 2101 (which is the recommended port for RTCM services according to the Internet Assigned Numbers Authority, IANA), and will identify the Reference Station with ID=1234. This behavior can be changed in the configuration file:
PVT.flag_rtcm_server=true
PVT.rtcm_tcp_port=2102
PVT.rtcm_station_id=1111
Important note:
In order to get well-formatted GeoJSON, KML, and RINEX files, always terminate
gnss-sdr execution by pressing key q and then key ENTER. Those files will
be automatically deleted if no position fix has been obtained during the
execution of the software receiver.
More documentation at the PVT Blocks page.
About the software license
GNSS-SDR is released under the General Public License (GPL) v3, thus securing practical usability, inspection, and continuous improvement by the research community, allowing the discussion based on tangible code and the analysis of results obtained with real signals. The GPL implies that:
- Copies may be distributed free of charge or for money, but the source code has to be shipped or provided free of charge (or at cost price) on demand. The receiver of the source code has the same rights meaning he can share copies free of charge or resell.
- The licensed material may be analyzed or modified.
- Modified material may be distributed under the same licensing terms but do not have to be distributed.
That means that modifications only have to be made available to the public if distribution happens. So it is perfectly fine to take the GNSS-SDR source code, modify it heavily and use it in a not distributed application / library. This is how companies like Google can run their own patched versions of Linux for example.
But what this also means is that non-GPL code cannot use GPL code. This means that you cannot modify / use GNSS-SDR, blend it with non-GPL code, and make money with the resulting software. You cannot distribute the resulting software under a non-disclosure agreement or contract. Distributors under the GPL also grant a license for any of their patents practiced by the software, to practice those patents in GPL software. You can sell a device that runs with GNSS-SDR, but if you distribute the code, it has to remain under GPL.
Publications and Credits
If you use GNSS-SDR to produce a research paper or Thesis, we would appreciate if you reference the following article to credit the GNSS-SDR project:
- C. Fernández-Prades, J. Arribas, P. Closas, C. Avilés, and L. Esteve, GNSS-SDR: an open source tool for researchers and developers, in Proceedings of the 24th International Technical Meeting of The Satellite Division of the Institute of Navigation (ION GNSS), Portland, Oregon, Sept. 19-23, 2011, pp. 780-794.
For LaTeX users, this is the BibTeX entry for your convenience:
@INPROCEEDINGS{GNSS-SDR11,
AUTHOR = {C.~{Fern\'{a}ndez--Prades} and J.~Arribas and P.~Closas and C.~Avil\'{e}s and L.~Esteve},
TITLE = {{GNSS-SDR}: An Open Source Tool For Researchers and Developers},
BOOKTITLE = {Proc. 24th Intl. Tech. Meeting Sat. Div. Inst. Navig.},
YEAR = {2011},
PAGES = {780--794},
ADDRESS = {Portland, Oregon},
MONTH = {Sept.} }
There is a list of papers related to GNSS-SDR in our publications page.
Ok, now what?
In order to start using GNSS-SDR, you may want to populate gnss-sdr/data
folder (or anywhere else on your system) with raw data files. By "raw data" we
mean the output of a Radio Frequency front-end's Analog-to-Digital converter.
GNSS-SDR needs signal samples already in baseband or in passband, at a suitable
intermediate frequency (on the order of MHz). Prepare your configuration file,
and then you are ready for running
gnss-sdr --config_file=your_configuration.conf, and seeing how the file is
processed.
Another interesting option is working in real-time with an RF front-end. We provide drivers for UHD-compatible hardware such as the USRP family, for OsmoSDR and other front-ends (HackRF, bladeRF, LimeSDR, and for some DVB-T USB dongles). Start with a low number of channels and then increase it in order to test how many channels your processor can handle in real-time.
You can find more information at the GNSS-SDR Documentation page or directly asking to the GNSS-SDR Developers mailing list.
You are also very welcome to contribute to the project, there are many ways to participate in GNSS-SDR. If you need some special feature not yet implemented, the Developer Team would love to be hired for developing it. Please do not hesitate to contact them.
Enjoy GNSS-SDR!
The Developer Team.